Q-learning with Flow-Matching Policies
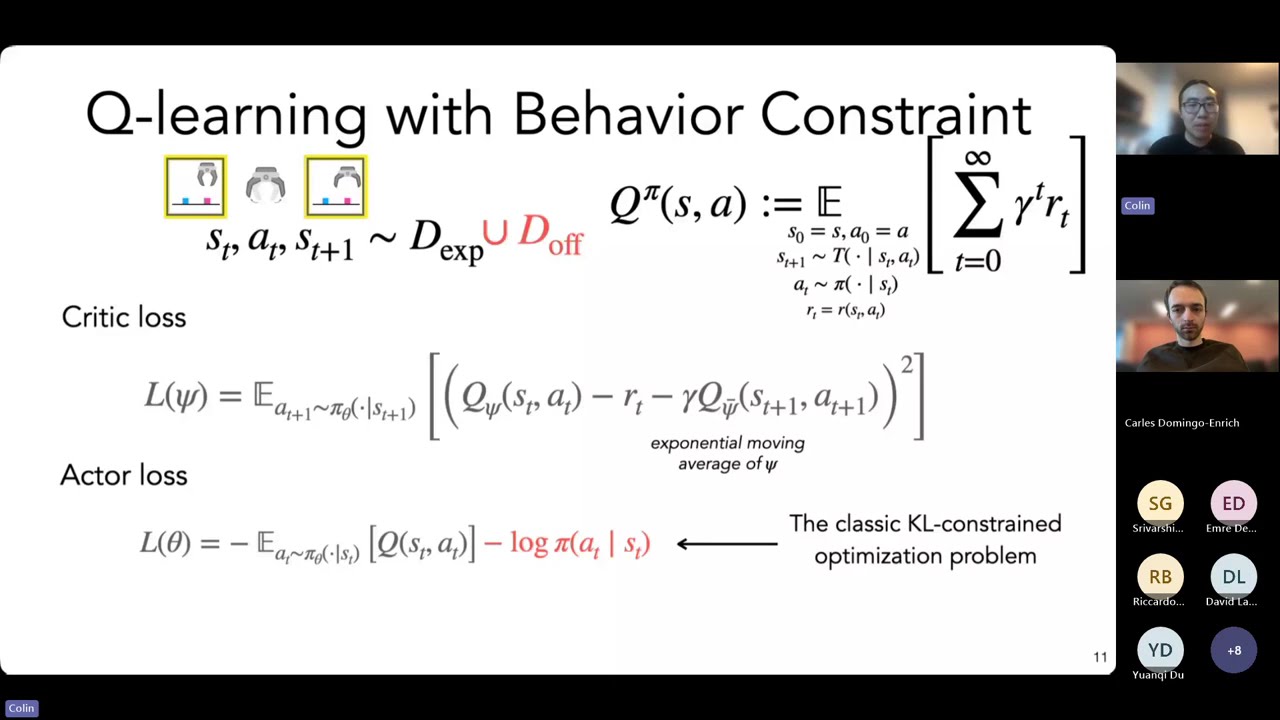
This talk explores methods for optimizing expressive, multi-modal policies, such as those based on flow-matching, with off-policy reinforcement learning. The speaker presents two novel algorithms, FQ-RL and CAM, designed to overcome the instability of backpropagation through multi-step generative models, enabling effective online self-improvement and adaptation for robotic manipulation tasks.